|
1. |
Tên đề tài: | Nhận dạng và điều khiển thích nghi các hệ phi tuyến đa biến ứng dụng các thuật toán lai thông minh điều khiển tối ưu nâng cao |
| 2. | Mã số | DS2022-20-09 |
| 3. | Chủ nhiệm đề tài: |
PGS.TS. Hồ Phạm Huy Ánh Nhóm nghiên cứu gồm: 1 GS.TS, 1 TS, 2 ThS. |
| 4. | Đơn vị: | Trường Đại học Bách Khoa, ĐHQG-HCM |
| 5. | Lĩnh vực: | Cơ khí,Tự động hóa, Kỹ thuật Giao thông |
| 6. | Loại hình : | Nghiên cứu cơ bản |
| 7. | Thời gian thực hiện: |
24 tháng (2022-2024) |
| 8. | Kinh phí nghiên cứu: | 750 triệu đồng |
| 9 | Thời gian nghiệm thu | Ngày 28 tháng 12 năm 2023 |
| 10 | Chủ tịch Hội đồng và quyết định thành lập HĐ |
Quyết định 1703/QĐ-ĐHQG ngày 05/12/2023 của Giám đốc ĐHQG-HCM bao gồm các thành viên cụ thể như sau:
|
| 11. | Nội dung thực hiện |
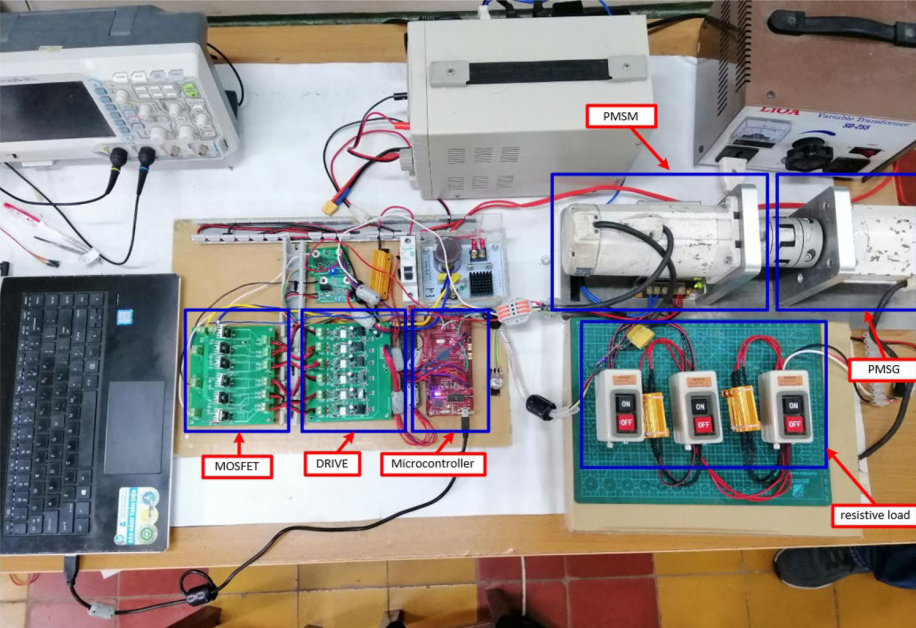
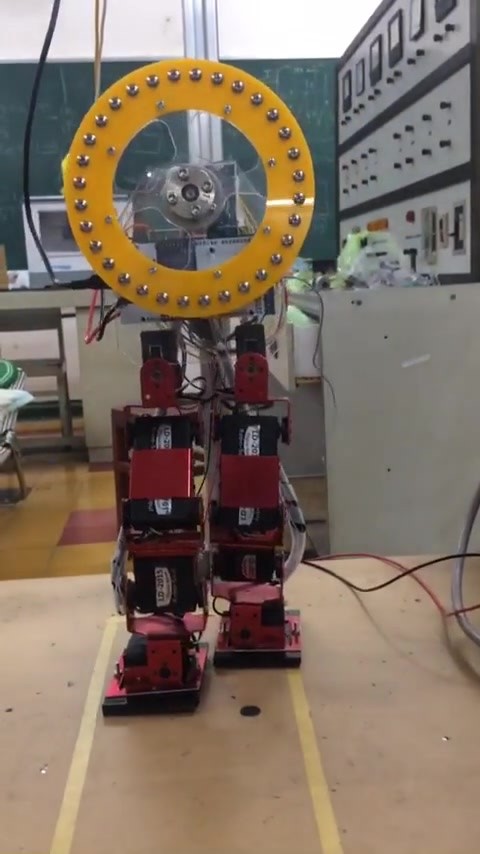
– Nội dung 1: Điều khiển thích nghi hệ tay máy PAM cơ bắp nhân tạo 2 bậc tự do dùng mô hình mờ Fuzzy trượt thích nghi. . Kết quả: Bài báo thứ nhất công bố tạp chí quốc tế ISI-SCIE-Q2. Giải thuật điều khiển hệ tay máy PAM cơ bắp nhân tạo 2 bậc tự do dùng mô hình mờ Fuzzy trượt (Fuzzy Sliding model) thích nghi được thiết kế hoàn chỉnh và viết trên nền MATLAB.. – Nội dung 2: Điều khiển bền vững bước đi hệ phi tuyến robot biped hai chân dạng người dùng mô hình nơ-rôn MIMO NARX thích nghi tối ưu bằng thuật toán tiến hóa nâng cao. . Kết quả: Bài báo thứ hai công bố tạp chí quốc tế ISI- SCI(E)-Q2. Giải thuật điều khiển bền vững bước đi hệ phi tuyến robot biped hai chân dạng người dùng mô hình nơ-rôn MIMO NARX thích nghi tối ưu bằng thuật toán tiến hóa nâng cao được viết trên nền MATLAB.. – Nội dung 3: Nhận dạng và điều khiển mô hình hệ phi tuyến truyền động động cơ PMSM dùng mô hình lai điều khiển tối ưu và bộ nhận dạng thông minh. . Kết quả: Bài báo khoa học đăng trên tạp chí khoa học uy tín trong nước. Giải thuật nhận dạng và điều khiển mô hình hệ phi tuyến truyền động động cơ PMSM dùng mô hình lai điều khiển tối ưu với bộ nhận dạng thông minh khảo sát trên mô hình mô phỏng và thực nghiệm, chạy trên nền MATLAB / Simulink. – Nội dung 4: Nhận dạng tối ưu mô hình bộ phát WPG hệ phi tuyến robot biped hai chân dạng người dùng mô hình nơ-rôn MIMO NARX tối ưu dùng giải thuật ước lượng thông minh. . Kết quả: Bài báo khoa học công bố trên Proceedings Hội nghị khoa học quốc tế SCOPUS (Springer) uy tín về tự động điều khiển. Giải thuật nhận dạng tối ưu mô hình bộ phát WPG hệ phi tuyến robot biped hai chân dạng người dùng mô hình nơ-rôn MIMO NARX tối ưu dùng giải thuật ước lượng thông minh, có khảo sát trên mô hình thực nghiệm biped HUBOT-4, hoàn chỉnh và chạy trên nền MATLAB / Simulink. – Nội dung 5: Nhận dạng tối ưu dùng mô hình mờ trượt (Fuzzy Sliding model) tiến hóa nâng cao để ước lượng, nhận dạng tối ưu và điều khiển thích nghi hệ phi tuyến đa biến tay máy PAM cơ bắp nhân tạo 2 bậc tự do. . Kết quả: Bài báo khoa học công bố trên Proceedings Hội nghị khoa học quốc tế SCOPUS (Springer) uy tín về tự động điều khiển. (Thực hiện trong năm 2023) Giải thuật nhận dạng tối ưu dùng mô hình mờ trượt (Fuzzy Sliding model) tiến hóa nâng cao lần đầu được đề xuất để ước lượng, nhận dạng tối ưu và điều khiển hệ phi tuyến đa biến tay máy PAM cơ bắp nhân tạo 2 bậc tự do, chạy trên nền MATLAB / Simulink |
| 12. | Kết quả |
* Sản phẩm mềm: 05 báo cáo chuyên đề đạt các tiêu chí cụ thể. * Sản phẩm cứng: Không. * Sản phẩm đào tạo và khoa học: – 03 Bài báo đăng trên tạp chí quốc tế ( Trong đó 02 bài tạp chí đạt Q1 và 01 bài tạp chí Q2) – 01 Bài báo thuộc hội nghị quốc tế trong danh mục Scopus – 03 Bài báo thuộc hội nghị quốc tế trong danh mục IEEE, Springer – 01 Bài báo tạp chí trong nước theo Hội đồng Giáo sư nhà nước. – 03/02 chuyên đề nghiên cứu sinh. (NCS. Phạm Nguyễn Nhựt Thanh bảo vệ 02 chuyên đề; NCS Phạm Quốc Khanh bảo vệ thành công Luận Án TS cấp Khoa ) – 02/02 Học viên cao học. |
| 13. | Hình ảnh giới thiệu kết quả |
|
| 14. | Thông tin liên hệ CNĐT |
Email: hphanh@hcmut.edu.vn Điện thoại: 0908.229.736 |
| 15. | Liên hệ ĐHQG-HCM | Ban Khoa học và Công nghệ (Phòng 309, NĐH) và Trang điện tử thông tin về hoạt động KH&CN (https://research.vnuhcm.edu.vn/) |