|
1. |
Tên đề tài: | NGHIÊN CỨU THIẾT KẾ BỘ ĐIỀU KHIỂN TỐI ƯU HỆ ROBOT BẦY ĐÀN SỬ DỤNG TRUYỀN THÔNG UWB (RESEARCH AND DESIGN OF OPTIMAL CONTROLLERS FOR SWARM ROBOT SYSTEMS USING UWB COMMUNICATIONS) |
| 2. | Mã số | C2020-20-46 |
| 3. | Chủ nhiệm đề tài: | TS. Nguyễn Lê Dũng Nhóm nghiên cứu gồm: 1PGS.TS, 2TS, 1.HVCH và 06 SV |
| 4. | Đơn vị: | Trường Đại học Bách Khoa, ĐHQG-HCM |
| 5. | Lĩnh vực: | Cơ khí,Tự động hóa, Kỹ thuật Giao thông Điện – Điện tử Công nghệ Thông tin và Truyền thông |
| 6. | Loại hình : | Nguyên cứu ứng dụng |
| 7. | Thời gian thực hiện: | 18 tháng (2020-2022), gia hạn đề tài |
| 8. | Kinh phí nghiên cứu: | 175 triệu đồng |
| 9 | Thời gian nghiệm thu | Ngày 17 tháng 08 năm 2023 |
| 10 | Chủ tịch Hội đồng và quyết định thành lập HĐ | GS.TS Hồ Phạm Huy Ánh (đơn vị Trường Đại học Bách Khoa TP.HCM, ĐHQG-HCM) theo Quyết định 933 ngày 22/7/2023 của Giám đốc ĐHQG-HCM |
| 11. | Nội dung thực hiện |
– Nội dung 1: Nghiên cứu tổng quan. . Kết quả: Báo cáo tổng quát các công trình trong và ngoài nước; từ đó củng cố định hướng nghiên cứu, mô hình. – Nội dung 2: Mô hình Robot. . Kết quả: Báo cáo thiết kế mô hình, các bản vẽ mạch điện, phần mềm chíp nhúng – Nội dung 3: Mô phỏng Robot. . Kết quả: Báo cáo lý thuyết, thuật toán và kiến thức mô phỏng bằng công cụ Matlab, V-Rep – Nội dung 4: Thực nghiệm Robot. . Kết quả: Mô phỏng Matlab, V-Rep, thực nghiệm kết quả – Nội dung 5: Tổng kết. . Kết quả: Tổng kết, đánh giá kết quả đạt được, hạn chế và hướng phát triển tương lai |
| 12. | Kết quả |
* Sản phẩm mềm: 01 phần mềm cần đạt các tiêu chí cụ thể. * Sản phẩm cứng: 01 hệ Robot * Sản phẩm đào tạo và khoa học: . 01 bài báo Q1 trên tạp chí The Journal of the Franklin Institute, Elsevier . Đào tạo: 06 kỹ sư. |
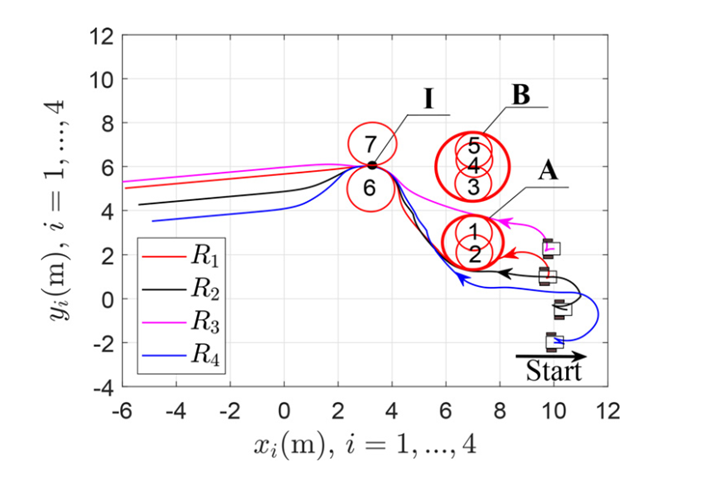
| 13. | Hình ảnh giới thiệu kết quả |
Hình 1. ET distributed robust optimal control structure of each agent
Hình 2. TT distributed optimal control for consensus and collision avoidance. |
| 14. | Thông tin liên hệ CNĐT | Email: nldung@hcmut.edu.vn / Điện thoại: 0938585777 |
| 15. | Liên hệ ĐHQG-HCM | Ban Khoa học và Công nghệ (Phòng 309, NĐH) và Trang điện tử thông tin về hoạt động KH&CN (https://research.vnuhcm.edu.vn/) |